



All In One设计
创新的All-in-one设计理念,将内减震设计,控制器,3轴陀螺仪,3轴加速度计和气压计等传感器集成在一个更轻更小巧的控制模块中,用于识别高度和姿态,从而实现自驾功能,锁定高度和平稳姿态。具备安装简单,节省大量空间,减轻机身重量的显著特点。

先进的姿态稳定算法
这部分利用了先进的组合导航算法和控制算法,不仅继承DJI传统产品优异的飞行安定性能,更在此基础上提高了机动性,具备操作更加灵活和稳定的特点,可以享受更加愉悦的飞行乐趣。

多种飞行控制模式/智能切换
Naza-M提供了多种控制模式:GPS姿态模式(插上GPS模块的情况下)、姿态模式和手动模式。用户可以在三种模式间自由快速切换,以适应各种飞行环境。 系统也会判断飞行环境的变化,做出智能的飞行模式切换。
GPS模块扩展/精准定位悬停
即插即用的NAZA-M GPS模块,提供精准定位、自动返航、智能方向控制等功能。在GPS模式下,Naza-M可以锁定经纬度和高度精确悬停,哪怕在风力较大的情况,也同样可以在很小范围内稳定悬停。精度可以达到水平≤2.5米,高度≤0.8米。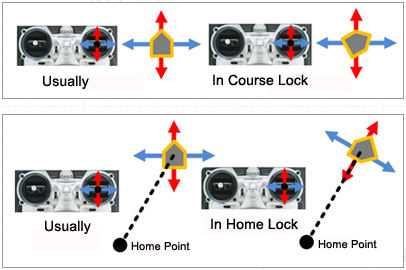
智能方向控制
在通常飞行过程中,飞行器的飞行前向始终和飞行器的机头朝向一致;启用智能方向控制后,在飞行过程中,飞行器的飞行前向和飞行器的机头朝向无关。
在使用航向锁定时,飞行前向和主控记录的某一时刻的机头朝向一致。如图所示: 在使用返航点锁定时,飞行前向为返航点到飞行器的方向。如图所示:

失控保护模式
如果您的遥控器支持失控保护,那您可以在U通道设置失控保护功能。Naza控制器内建自动平衡的失控保护功能,即在成功设置失控保护后,当主控和遥控器失去联系时,主控会将所有命令杆输出回中。如果您的遥控器只有4 个通道,那么主控将默认工作在姿态模式下,并且没有失控保护功能。

低电压保护
为了避免电池电压过低而造成摔机等严重后果,我们为您设计了两级低压保护措施。您可以选择不使用,但我们强烈建议您开启该功能!同时请确保主控和多功能模块间的连接(V-SEN至X3)没有问题,否则低压保护将无法正常工作。
掰杆启动模式
掰杆启动:掰杆方式有四种,参见右图:
任何情况下启动飞行器(包括任何状态下电机停转后)都需要执行掰杆方式中的任意一种。如果在飞行过程中,电机停转,立即执行任意一种掰杆启动后,电机将立即恢复转动,增强了飞机在飞行过程中的安全性。

掰杆停止模式
分为立即模式和智能模式两种,不同飞行控制模式下电机停止方式不同:
1. 立即模式
在手动和姿态两种控制模式下的停止方式是一致的,具体有以下两种方式:
a. 电机启动后,一旦油门杆超过10%后,当油门杆再次低于10%,电机便会立即停转。
b. 如果电机停转后5秒内没有将油门杆推至10%以上,电机将立即停转。
- 智能模式
在手动控制模式下,只有执行掰杆动作才能使电机停转。
在姿态控制模式下,具体有以下四种方式:
a. 电机启动后5秒内没有推油门至10%以上的,电机将立即停转。
b. 执行任意掰杆动作,电机将立即停转。
c. 油门摇杆在10%以下,并且成功着陆3秒后,电机将立即停转。
d. 飞行器倾斜角度超过70度并且油门摇杆在10%以下,电机将立即停转。

S-Bus和PPM接收机支持
四通道和四通道以上的接收机均可支持,也能支持PPM 和 Futaba的S-Bus接收机。
S-Bus接收机(目前一般使用S-Bus接收机的前8个通道)优化了通道连接,将A,E,T,R,U五个通道的功能集合在X2一个通道,仅使用一根舵机线连接S-Bus和X2即可,安装起来方便快捷,也不容易出错。可参考右图。

支持的多旋翼类型
NAZA”哪吒”一共支持六种不同的多旋翼机型,满足不同爱好者的需求。
四旋翼—- I型(图1),X型(图2)
六旋翼—- I型(图3),V型(图4),IY型(图5),Y型(图6)

云台增稳
支持两轴云台—俯仰和横滚,根据飞机姿态自动补偿云台角度,大大提高了航拍的稳定度,以满足航拍爱好者的需要。

远程调参和固件升级扩展
系统设置的默认参数已经能实现正常飞行,还能支持远程调参,可在飞行过程中通过遥控器旋钮进行实时调整飞行参数,以获得最佳飞行表现。固件也可轻松在线升级,并预留了硬件扩展接口。