人性化界面設計
DJI始終堅持強調用户體驗的產品化原則,地面站系統提供的是人性化的3D圖形操作界面,直觀便捷、淺顯易懂,突破了傳統的無人機控制系統安裝複雜、操作繁瑣、表現形式單一、過於依賴數據顯示的陳規。基於友好的用户界面,不僅大大減少了規劃飛行任務的複雜度,節省了時間,提高了準確率,同時也支持了更多靈活、智能的操作方法。
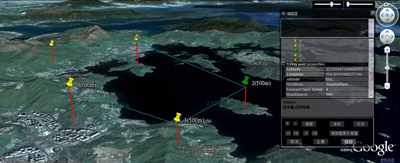
谷歌3D地圖視角
直觀呈現3D效果的真實世界地圖,包含地理信息數據。所有地圖均可在線更新,使用者可在任意地方規劃飛行航線。使用鼠標滾輪來進行地圖放大及縮小,通過右側區域的按鈕進行視角方位調節、移動地圖方向按鈕和鏡頭視野調節的操作,整個操作過程非常流暢,沒有絲毫停頓的感覺。地圖可預先下載到本地緩衝,實現户外的脱機使用。
工業級飛行控制算法
整套系統結合了GPS、6 自由度慣性測量單元、磁場計、氣壓高度計等傳感器單元,優化了高魯棒性H無窮算法以及專家系統等機器人控制的理論模型,運用了先進的GPS/INS傳感器融合算法技術,在高震動,高機動性環境,仍然保持很高的計算精度,使飛行器始終保持飛行穩定性、機動性和精準度,大大提升飛行任務的成功率。
實時飛行儀表盤
除了在3D效果的地圖中實時顯示飛機當前座標、海拔高度等數據外,圖形化的飛行儀表盤也可實時顯示飛機的狀態數據,如飛行姿態、飛行速度、垂直速度、海拔高度等信息,使您對飛機的狀態瞭如指掌。
遇險自動返航/一鍵返航
地面站系統會智能判斷非正常的控制信號丟失情況,做出適當的失控保護處理。 當飛機全自動執行飛行任務時,即使電台信號丟失,飛機也會繼續完成預設的航線飛行任務;當飛機處於使用者手動控制下,而發生丟失控制信號的情況後,飛機會保持原地自主懸停,並在超過10秒後信號仍未恢復情況下,精確找到起飛點,以最安全的路線和高度,自動返回起飛點上空懸停,給昂貴的飛機系統設備一個強大的安全保障。除此以外,用户也可以隨時點擊返航按鈕,系統將立即中斷當前的飛行任務,命令飛機開始返航。
鍵盤/自定義搖桿飛行控制
地面站系統允許操作員使用鍵盤或自定義飛行控制搖桿,通過DJI數傳電台控制飛機的上升、下降、轉彎和姿態,在超出遙控器遙控範圍的情況下,使手動操作飛機成為可能,不僅大大增加了飛機的可控制範圍,甚至飛行全程都不需要再使用遙控器。
隨點隨行功能
直接在3D地圖上點擊任意某處,即可實現飛機向所點座標的自主飛行,特別適合於完成那些無法預先設置航線,需要隨時變更飛行目標的飛行任務。同時還可隨時調整飛行高度和飛行速度,系統會根據參數及目標點的變化,智能調整飛機速度和姿態,體現出快速、準確、敏捷的反應能力和機動性。
超視距全自動飛行控制
地面站系統專為高端的商用及工業用無人機進行超視距(BVR)全自動飛行作業而設計,配備了可靠的遠程無線通訊設備(Data Link)和人性化設計的地面站控制軟件(GCS)。使用者可以在地面站控制軟件中預先規劃整個飛行航線,以及預設拍照、空投等作業動作。通過軟件的航線自檢功能和3D化的地理信息顯示,對飛行任務的合理性和準確性一目瞭然。整套系統不僅能確保飛行器穩定的飛行狀態和安全性,精確地航線飛行、再輔以全自動起飛/降落,自適應轉彎調整,遇險自動返航等高級功能,實現整個飛行任務在無人干預的情況下全自動執行,大大降低了無人機專業應用的複雜程度,可廣泛應用於專業航拍(AP)、遙感測繪、航空探礦、災情監視、交通巡邏、治安監控、森林防火等領域。
全自主起飛/降落
地面站系統提供多種起飛/降落方式,在核心控制模塊保證飛機姿態穩定的前提下,使用者可以通過遙控器或鍵盤輕鬆完成簡單的起飛/降落步驟,也可以委託系統完成全自動的起飛/降落,系統會控制飛行器以0.2~0.5米/秒的速度平穩智能起降。自定義航點
航點是組成航線任務的基本單元。使用者可以對每一個航點進行特殊的設置,如高度、經緯度、飛行速度、機頭朝向、轉彎模式和停留時間等等,也可以一次性對所有的航點進行批量設置。
6種預設航線模板
地面站軟件提供6種常用的航線模板,可快速完成在某個指定的區域內定高定距的航線任務的規劃工作。任務區域的大小與座標,區域內航點的數量,航點的屬性等均可以自定義,特別適合於正向攝影、精確地圖繪製、噴灑農業等應用。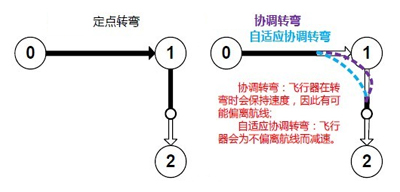
3種航點轉彎模式可選
在航線規劃中,可以為每個航點設置一種轉彎模式:定點轉彎模式、協調轉彎模式和自適應協調轉彎模式。
定點轉彎模式是指飛機到達航點的準確座標後,停留用户所設置的時間,再飛向下一個航點。 協調轉彎模式下飛行器會智能計算轉彎速度和轉彎的角度,不經過航點,直接轉向下一個航點。 自適應協調模式與協調轉彎模式的最大區別在於,自適應協調轉彎模式下,飛行器會為不偏離航線而自動減速,而協調轉彎模式下飛行器會在轉彎時儘量保持速度,因此有可能較大幅度偏離航線。

自定義舵機通道控制
DJI飛控提供了兩個舵機輸出通道用於支持自定義舵機功能,可作為DJI飛控系統與您的外圍設備之間的接口。此功能可使DJI飛控在執行基本的飛行器航點飛行任務期間自動操作您的外圍設備,如拍照、空投、開關閥門等。






