人性化界面设计
DJI始终坚持强调用户体验的产品化原则,地面站系统提供的是人性化的3D图形操作界面,直观便捷、浅显易懂,突破了传统的无人机控制系统安装复杂、操作繁琐、表现形式单一、过于依赖数据显示的陈规。基于友好的用户界面,不仅大大减少了规划飞行任务的复杂度,节省了时间,提高了准确率,同时也支持了更多灵活、智能的操作方法。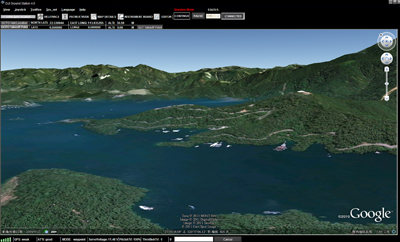
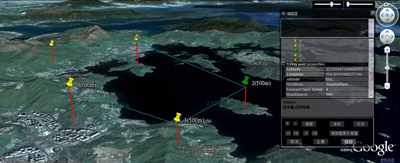
谷歌3D地图视角
直观呈现3D效果的真实世界地图,包含地理信息数据。所有地图均可在线更新,使用者可在任意地方规划飞行航线。使用鼠标滚轮来进行地图放大及缩小,通过右侧区域的按钮进行视角方位调节、移动地图方向按钮和镜头视野调节的操作,整个操作过程非常流畅,没有丝毫停顿的感觉。地图可预先下载到本地缓冲,实现户外的脱机使用。
工业级飞行控制算法
整套系统结合了GPS、6 自由度惯性测量单元、磁场计、气压高度计等传感器单元,优化了高鲁棒性H无穷算法以及专家系统等机器人控制的理论模型,运用了先进的GPS/INS传感器融合算法技术,在高震动,高机动性环境,仍然保持很高的计算精度,使飞行器始终保持飞行稳定性、机动性和精准度,大大提升飞行任务的成功率。
实时飞行仪表盘
除了在3D效果的地图中实时显示飞机当前坐标、海拔高度等数据外,图形化的飞行仪表盘也可实时显示飞机的状态数据,如飞行姿态、飞行速度、垂直速度、海拔高度等信息,使您对飞机的状态了如指掌。
遇险自动返航/一键返航
地面站系统会智能判断非正常的控制信号丢失情况,做出适当的失控保护处理。 当飞机全自动执行飞行任务时,即使电台信号丢失,飞机也会继续完成预设的航线飞行任务;当飞机处于使用者手动控制下,而发生丢失控制信号的情况后,飞机会保持原地自主悬停,并在超过10秒后信号仍未恢复情况下,精确找到起飞点,以最安全的路线和高度,自动返回起飞点上空悬停,给昂贵的飞机系统设备一个强大的安全保障。除此以外,用户也可以随时点击返航按钮,系统将立即中断当前的飞行任务,命令飞机开始返航。
键盘/自定义摇杆飞行控制
地面站系统允许操作员使用键盘或自定义飞行控制摇杆,通过DJI数传电台控制飞机的上升、下降、转弯和姿态,在超出遥控器遥控范围的情况下,使手动操作飞机成为可能,不仅大大增加了飞机的可控制范围,甚至飞行全程都不需要再使用遥控器。
随点随行功能
直接在3D地图上点击任意某处,即可实现飞机向所点坐标的自主飞行,特别适合于完成那些无法预先设置航线,需要随时变更飞行目标的飞行任务。同时还可随时调整飞行高度和飞行速度,系统会根据参数及目标点的变化,智能调整飞机速度和姿态,体现出快速、准确、敏捷的反应能力和机动性。
超视距全自动飞行控制
地面站系统专为高端的商用及工业用无人机进行超视距(BVR)全自动飞行作业而设计,配备了可靠的远程无线通讯设备(Data Link)和人性化设计的地面站控制软件(GCS)。使用者可以在地面站控制软件中预先规划整个飞行航线,以及预设拍照、空投等作业动作。通过软件的航线自检功能和3D化的地理信息显示,对飞行任务的合理性和准确性一目了然。整套系统不仅能确保飞行器稳定的飞行状态和安全性,精确地航线飞行、再辅以全自动起飞/降落,自适应转弯调整,遇险自动返航等高级功能,实现整个飞行任务在无人干预的情况下全自动执行,大大降低了无人机专业应用的复杂程度,可广泛应用于专业航拍(AP)、遥感测绘、航空探矿、灾情监视、交通巡逻、治安监控、森林防火等领域。
全自主起飞/降落
地面站系统提供多种起飞/降落方式,在核心控制模块保证飞机姿态稳定的前提下,使用者可以通过遥控器或键盘轻松完成简单的起飞/降落步骤,也可以委托系统完成全自动的起飞/降落,系统会控制飞行器以0.2~0.5米/秒的速度平稳智能起降。自定义航点
航点是组成航线任务的基本单元。使用者可以对每一个航点进行特殊的设置,如高度、经纬度、飞行速度、机头朝向、转弯模式和停留时间等等,也可以一次性对所有的航点进行批量设置。
6种预设航线模板
地面站软件提供6种常用的航线模板,可快速完成在某个指定的区域内定高定距的航线任务的规划工作。任务区域的大小与坐标,区域内航点的数量,航点的属性等均可以自定义,特别适合于正向摄影、精确地图绘制、喷洒农业等应用。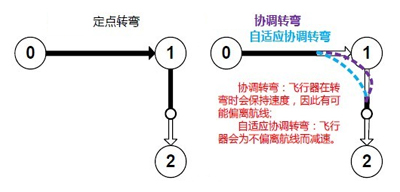
3种航点转弯模式可选
在航线规划中,可以为每个航点设置一种转弯模式:定点转弯模式、协调转弯模式和自适应协调转弯模式。
定点转弯模式是指飞机到达航点的准确坐标后,停留用户所设置的时间,再飞向下一个航点。 协调转弯模式下飞行器会智能计算转弯速度和转弯的角度,不经过航点,直接转向下一个航点。 自适应协调模式与协调转弯模式的最大区别在于,自适应协调转弯模式下,飞行器会为不偏离航线而自动减速,而协调转弯模式下飞行器会在转弯时尽量保持速度,因此有可能较大幅度偏离航线。

自定义舵机通道控制
DJI飞控提供了两个舵机输出通道用于支持自定义舵机功能,可作为DJI飞控系统与您的外围设备之间的接口。此功能可使DJI飞控在执行基本的飞行器航点飞行任务期间自动操作您的外围设备,如拍照、空投、开关阀门等。






