




Multirotor-Stabilisierungscontroller
Der DJI WooKong Multirotor-Stabilisierungscontroller ist ein komplettes Flugsystem für alle Multirotor-Plattformen für gewerbliche und industrielle Luftaufnahmen. Im Gegensatz zu anderen Systemen arbeitet die WooKong mit herkömmlichen ESCs, die häufig in ferngesteuerten Helikoptern zum Einsatz kommen, ohne dass die Verkabelung geändert werden muss. Die Einrichtung des Heli-Modus bietet für Luftbild-Profis, die derzeit mit Ace One arbeiten, einen nahtlosen Übergang. In der WK-M sind präzise kalibrierte hochwertige Komponenten verbaut. Sie verfügt über eine Temperaturkompensation in allen Kreiseln und Sensoren, einen branchenweit angesehenen Flugalgorithmus im Autopilot und ein Drohnen-Feld.
9 verschiedene Multirotoren und anpassbare Motoreinstellungen
Unterstützung von 9 herkömmlichen Mischermotoren:
Quad I, Quad X
Hexa I, Hexa V, Hexa Y, Hexa IY
Octo X, Octo I,Octo V
Das System ist für gewerbliche und industrielle Multirotor-Plattformen ausgelegt. Es bietet eine einfache Konfiguration und Installation sowie eine zuverlässige Leistung.

Integrierte Gimbal-Stabilisierungsfunktion
Das Gimbal-Stabilisierungsmodul ist zu den meisten 2-Achsen-Gimbalsystemen kompatibel. Nach der ersten Einstellung der Parameter passt das System die Kamera je nach Fluglage der Drohne automatisch an. Der Bereich der Gimbal-Servoausgangsfrequenz ist 400 Hz, 200 Hz, 100 Hz und 50 Hz. Die höherfrequenten Ausgänge ermöglichen eine effizientere Anpassung. Gleichzeitig wird der Grenzwert des Gimbal-Servorollens und -nickens auf 90° erweitert.

iPad-Unterstützung der Bodenkontrollstation
Die WooKong-M Bodenkontrollstation unterstützt jetzt das iPad (derzeit iPad 3, iPad 4, iPad mini). Du musst nur noch einen Bluetooth-Datalink und das BTU-Modul anschließen. Vorbei sind die Zeiten, in denen du einen schweren Laptop mitschleppen musstest. Keine Installation von Karten und Treibern, keine Kompatibilitätsprobleme mit der Windows Betriebssystemversion und kein Google Earth. Ganz ohne lange Kabel kannst du nun die Drohne über deine Bodenstation auf dem iPad steuern. Das ist so einfach wie ein Spiel auf deinem iPad. Darüber hinaus zählt der neue Trend zum Verwenden eines iPads mit Wegpunkten zu den weiteren Höhepunkten. Weitere Informationen erhältst du [ here ].http://www.dji.com/dji-released-2-4g-bluetooth-datalink-ipad-ground-station/) for more information.

Neue Assistant Software für Smartphones
WooKong-M bietet jetzt die Assistant Software für iPhone 4s, iPhone 5, iPad 3, iPad 4, iPad mini und iPod 5. Du kannst jederzeit Anpassungen auf deinen mobilen Geräten vornehmen. Dazu ist lediglich eine LED-Anzeige mit integriertem Bluetooth-Modul erforderlich. Die Bedienung ist einfach und bequem. Zur Kommunikation wird Bluetooth mit geringer Sendeleistung verwendet, um den Stromverbrauch deiner mobilen Geräte zu minimieren. Die Software ist einfach zu bedienen und speichert automatisch deine letzten Verbindungsaufzeichnungen. Ein Passwortschutz sorgt für eine sichere Verbindung. Die Parameter können automatisch mit dem Cloud-Server synchronisiert und sofort wiederhergestellt werden, wenn du das mobile Gerät wechselst.

Unterstützung von Futaba S-Bus-Empfängern
Kompatibel zu fast allen Funksteuerungen oder 2,4 GHz

Leistungsüberwachungseinheit
Speziell für die WKM konzipierte Lösung, um das Problem des hohen Stromverbrauchs des Energieunterstützungssystems zu beheben. Sie enthält zwei Leistungsausgänge für das gesamte WKM-System, einen separaten Empfänger, eine Akkuspannungsüberwachung und zwei CAN-Bus-Schnittstellen.

Integrierte Dämpfer
Die kleine Größe und das geringe Gewicht bieten eine einfache Installation auf kleinen Flächen für verschiedene Drohnengrößen.

Halten der genauen Position und Höhe
Dank der WKM verfügen die Multirotoren über eine Positions- und Flughöhensperre bei windigen Bedingungen. Präziser Schwebeflug bei weniger als 2 m horizontal und 0,5 m vertikal.

Hohe Genauigkeit und direktes Gefühl beim Fliegen
Dank der WKM gestaltet sich das Fliegen eines Multirotors so einfach wie das Steuern eines Fahrzeugs. Der Pilot muss sich nicht mehr auf das Steuern des Multirotors konzentrieren, sondern kann anderen Aufgaben, wie dem Einstellen des Kamerawinkels, mehr Aufmerksamkeit widmen.

Modus Motorstart/-stopp
-
Motor starten: Bei der Verwendung der WKM werden die Motoren nicht durch einfaches Drücken des Gashebels vor dem Abheben gestartet. Zum Starten der Motoren musst du einen der folgenden vier Befehle mit den beiden Steuerhebeln gleichzeitig ausführen.
-
Motor stoppen: Du hast zwei Möglichkeiten, die Motoren zu stoppen: Sofort-Modus und intelligenter Modus. Sofort-Modus: Wenn dieser Modus in einem beliebigen Betriebsmodus verwendet wird, die Motoren gestartet werden und sich der Gashebel über 10 % befindet, werden die Motoren sofort gestoppt, wenn sich der Gashebel wieder unter 10 % befindet. Wenn du dann den Gashebel innerhalb von 5 Sekunden nach dem Stoppen der Motoren wieder auf über 10 % drückst, werden die Motoren erneut gestartet. Ein gleichzeitiges Bedienen der beiden Steuerhebel ist nicht erforderlich. Wenn du den Gashebel innerhalb von 3 Sekunden nach dem Starten der Motoren nicht drückst, werden die Motoren automatisch gestoppt. Intelligenter Modus: Wenn dieser Modus verwendet wird, wirken sich die verschiedenen Betriebsmodi unterschiedlich auf das Stoppen der Motoren aus. Im manuellen Modus können die Motoren nur durch das gleichzeitige Bedienen der Steuerhebel gestoppt werden. Im Atti-Modus oder GPS-Atti-Modus werden die Motoren durch einen der folgenden vier Fälle gestoppt:
Intelligentes Umschalten zwischen mehreren Betriebsmodi
| GPS-Atti- Modus | Atti- Modus | Manueller Modus | |
| Funktion des Steuerhebels | Steuerung mehrerer Fluglagen; Mittelstellung des Steuerhebels für 0º-Fluglage, Endpunkt ist 35º. | Maximale Winkelgeschwindigkeit beträgt 150°/s. Keine Begrenzung des Fluglagenwinkels oder Sperre der vertikalen Geschwindigkeit. | |
| Befehlslinearität | JA | ||
| Hebel freigegeben | Sperrung der Rotorposition bei angemessenem GPS-Signal. | Nur Stabilisierung der Fluglage. | NICHT empfohlen |
| Flughöhensperre | Beste Beibehaltung der Höhe bei 1 m über dem Boden. | NEIN | |
| GPS-Signalverlust | Nach einem GPS-Signalverlust wechselt das System nach 10 Sekunden automatisch in den Atti-Modus. | Nur Stabilisierung der Fluglage ohne Positionssperre. | – |
| Sicherheit | Stabilität durch eine gemischte Steuerung der Fluglage und der Geschwindigkeit; erweiterte Ausfallsicherheit | Beruht auf Erfahrung. | |
| Anwendungen | Luftbildaufnahmen | Sportfliegen | – |

POI-Modus (Zielpunkt)
Die WooKong-M verfügt über eine neue Funktion: Zielpunkt (POI, Point of Interest). Wenn das GPS-Signal in Ordnung ist, können Benutzer die gegenwärtige Position der Drohne als Zielpunkt über den Voreinstellungsschalter auf der Fernsteuerung aufzeichnen. Die Drohne kann um den Zielpunkt einen Kreisflug durchführen, wobei die Nase zum Punkt zeigt und die Drohne einen Radius von 5 m bis 500 m beschreibt, wenn der Rollbefehl gegeben wird. Diese Funktion ist leicht einzurichten und bequem zu bedienen. Sie eignet sich für eine Rundumaufnahme eines festen Aussichtspunkts.

RTH-Schalter von Sender
Neben der Funktion der sicherheitsbedingten Rückkehr verfügt die WooKong-M jetzt auch über die neue Funktion RTH-Schalter von Sender. Dabei ist es nicht erforderlich, in den ausfallsicheren Modus zu schalten.
iOSD MARK II-Unterstützung
Die WooKong-M unterstützt jetzt das iOSD MARK II. Dies wird dir zweifellos eine fantastische Flugleistung bieten. Dank der Erfahrung von DJI bei Technologien zur zuverlässigen Informationsintegration erfasst das iOSD MARK II die genauesten Flugdaten aus erster Hand in kürzester Zeit.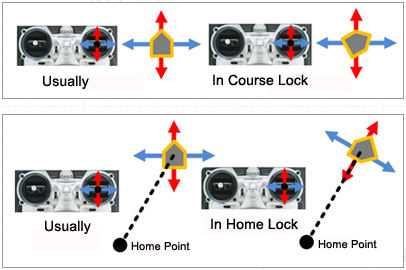
Intelligente Flugsteuerung (IOC)
Normalerweise entspricht die Flugrichtung eines in der Luft befindlichen Multirotors der Ausrichtung der Nase. Bei Verwendung der intelligenten Flugsteuerung (IOC, Intelligent Orientation Control) entspricht die Vorwärtsrichtung nicht unbedingt der Ausrichtung der Nase:
Beim Fliegen im CL-Modus (Course Lock) entspricht die Vorwärtsrichtung der aufgezeichneten Ausrichtung der Nase. Siehe die folgenden Abbildungen (Modus 2): Beim Fliegen im HL-Modus (Home Lock) entspricht die Vorwärtsrichtung der Richtung vom Startpunkt zum Multirotor. Siehe die folgenden Abbildungen (Modus 2):

Erweiterte Ausfallsicherheit und automatisches Anfliegen der Startposition/Landung
Bei der erweiterten Ausfallsicherheit handelt es sich um eine Funktion, die sicherstellt, dass der Multirotor bei Signalverlust der Fernsteuerung automatisch im Schwebeflug verbleibt. Verstreicht eine gewisse Zeit nach Verlust des Signals, berechnet die WKM den sichersten Kurs, um den Helikopter die Startposition anfliegen zu lassen. Der Helikopter hält über dem GPS-Startpunkt und landet automatisch. Diese Funktion schützt deine teure Zuladung und Ausrüstung auf der Plattform.
Multirotor-Schutz bei Ausfall einer Ausgangsleistung
Unter den meisten Bedingungen behält der Multirotor eine gute Fluglage bei. Fällt ein Rahmenträger wegen mangelnder Ausgangsleistung aus, dreht sich der Multirotor wegen der mechanischen Unwucht und der externen Umgebung um diesen Rahmenträger. Ein Drehen wird hauptsächlich durch die Zuladung und die externe Umgebung verursacht. Je schwerer die Zuladung, desto höher die Drehgeschwindigkeit. Beim Drehen kann es vorkommen, dass das Seitenruder durch die physische Struktur des Hexrotors außer Kontrolle gerät. Die Personenschutzfunktion der WooKong-M im Atti-Modus oder GPS-Modus hält die Fluglage unter Kontrolle, selbst wenn keine Ausgangsleistung anliegt. Dadurch wird die Gefahr eines Absturzes erheblich reduziert.
Zweistufiger Unterspannungsschutz und automatisches Anfliegen der Startposition
Um das Abstürzen deines Multirotors und andere schädliche Folgen durch eine niedrige Akkuspannung zu vermeiden, haben wir einen zweistufigen Unterspannungsschutz entwickelt. Die Verwendung dieser Funktion steht dir frei. Beide Stufen dieser Schutzfunktion verfügen standardmäßig über eine LED-Warnung. Bei Erreichen der ersten Stufe blinkt eine gelbe LED kontinuierlich. Bei Erreichen der zweiten Stufe blinkt eine rote LED kontinuierlich. Wenn du die Funktion zum Anfliegen der Startposition und Landung beim Unterspannungsschutz mit der Funktion zum Anfliegen der Startposition und Landung bei der erweiterten Ausfallsicherheit vergleichst, wirst du feststellen, dass die Verfahren zum Berechnen der Startposition sowie die Kurse zum Anfliegen der Startposition identisch sind. Der Unterschied besteht darin, dass beim Unterspannungsschutz kein Schwebeflug vor dem Landen durchgeführt wird.
Upgrade zur Bodenkontrollstation
WooKong-M kann mit einem Upgrade auch als Bodenstation verwendet werden. Du erhältst damit eine leistungsstärkere unbemannte Plattform, die den hohen Anforderungen unserer Kunden gerecht wird.
Jetzt musst du nur noch einen professionellen Datalink von DJI erwerben und eine Aktualisierung auf die neueste WooKong-M 5.26 Firmware durchführen. Danach steht dir die Bodenstationsfunktion kostenlos ohne Seriennummer zur Verfügung. Zusätzlich erhältst du eine kostenlose Unterstützung für 50 Wegpunkte. Neben der 3D-Karte enthält das System auch Bodenstationsfunktionen wie Joystick-/Tastatursteuerung, Start per Tastendruck und Click & Go.