



All In One設計
創新的All-in-one設計理念,將內減震設計,控制器,3軸陀螺儀,3軸加速度計和氣壓計等傳感器集成在一個更輕更小巧的控制模塊中,用於識別高度和姿態,從而實現自駕功能,鎖定高度和平穩姿態。具備安裝簡單,節省大量空間,減輕機身重量的顯著特點。

先進的姿態穩定算法
這部分利用了先進的組合導航算法和控制算法,不僅繼承DJI傳統產品優異的飛行安定性能,更在此基礎上提高了機動性,具備操作更加靈活和穩定的特點,可以享受更加愉悦的飛行樂趣。

多種飛行控制模式/智能切換
Naza-M提供了多種控制模式:GPS姿態模式(插上GPS模塊的情況下)、姿態模式和手動模式。用户可以在三種模式間自由快速切換,以適應各種飛行環境。 系統也會判斷飛行環境的變化,做出智能的飛行模式切換。
GPS模塊擴展/精準定位懸停
即插即用的NAZA-M GPS模塊,提供精準定位、自動返航、智能方向控制等功能。在GPS模式下,Naza-M可以鎖定經緯度和高度精確懸停,哪怕在風力較大的情況,也同樣可以在很小範圍內穩定懸停。精度可以達到水平≤2.5米,高度≤0.8米。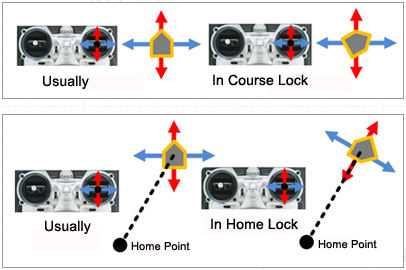
智能方向控制
在通常飛行過程中,飛行器的飛行前向始終和飛行器的機頭朝向一致;啟用智能方向控制後,在飛行過程中,飛行器的飛行前向和飛行器的機頭朝向無關。
在使用航向鎖定時,飛行前向和主控記錄的某一時刻的機頭朝向一致。如圖所示: 在使用返航點鎖定時,飛行前向為返航點到飛行器的方向。如圖所示:

失控保護模式
如果您的遙控器支持失控保護,那您可以在U通道設置失控保護功能。Naza控制器內建自動平衡的失控保護功能,即在成功設置失控保護後,當主控和遙控器失去聯繫時,主控會將所有命令杆輸出回中。如果您的遙控器只有4 個通道,那麼主控將默認工作在姿態模式下,並且沒有失控保護功能。

低電壓保護
為了避免電池電壓過低而造成摔機等嚴重後果,我們為您設計了兩級低壓保護措施。您可以選擇不使用,但我們強烈建議您開啟該功能!同時請確保主控和多功能模塊間的連接(V-SEN至X3)沒有問題,否則低壓保護將無法正常工作。
掰杆啟動模式
掰杆啟動:掰杆方式有四種,參見右圖:
任何情況下啟動飛行器(包括任何狀態下電機停轉後)都需要執行掰杆方式中的任意一種。如果在飛行過程中,電機停轉,立即執行任意一種掰杆啟動後,電機將立即恢復轉動,增強了飛機在飛行過程中的安全性。

掰杆停止模式
分為立即模式和智能模式兩種,不同飛行控制模式下電機停止方式不同:
1. 立即模式
在手動和姿態兩種控制模式下的停止方式是一致的,具體有以下兩種方式:
a. 電機啟動後,一旦油門杆超過10%後,當油門杆再次低於10%,電機便會立即停轉。
b. 如果電機停轉後5秒內沒有將油門杆推至10%以上,電機將立即停轉。
- 智能模式
在手動控制模式下,只有執行掰杆動作才能使電機停轉。
在姿態控制模式下,具體有以下四種方式:
a. 電機啟動後5秒內沒有推油門至10%以上的,電機將立即停轉。
b. 執行任意掰杆動作,電機將立即停轉。
c. 油門搖桿在10%以下,並且成功着陸3秒後,電機將立即停轉。
d. 飛行器傾斜角度超過70度並且油門搖桿在10%以下,電機將立即停轉。

S-Bus和PPM接收機支持
四通道和四通道以上的接收機均可支持,也能支持PPM 和 Futaba的S-Bus接收機。
S-Bus接收機(目前一般使用S-Bus接收機的前8個通道)優化了通道連接,將A,E,T,R,U五個通道的功能集合在X2一個通道,僅使用一根舵機線連接S-Bus和X2即可,安裝起來方便快捷,也不容易出錯。可參考右圖。

支持的多旋翼類型
NAZA”哪吒”一共支持六種不同的多旋翼機型,滿足不同愛好者的需求。
四旋翼—- I型(圖1),X型(圖2)
六旋翼—- I型(圖3),V型(圖4),IY型(圖5),Y型(圖6)

雲台增穩
支持兩軸雲台—俯仰和橫滾,根據飛機姿態自動補償雲台角度,大大提高了航拍的穩定度,以滿足航拍愛好者的需要。

遠程調參和固件升級擴展
系統設置的默認參數已經能實現正常飛行,還能支持遠程調參,可在飛行過程中通過遙控器旋鈕進行實時調整飛行參數,以獲得最佳飛行表現。固件也可輕鬆在線升級,並預留了硬件擴展接口。