




Contrôleur de stabilisation pour multirotors
Le contrôleur de stabilisation pour multirotors DJI Wookong est un système de vol complet adapté à l'ensemble des plates-formes multirotor pour photographie aérienne commerciale et industrielle. Contrairement aux autres contrôleurs, le WooKong permet d'utiliser les régulateurs électroniques de vitesse ordinaires équipant la plupart des hélicoptères radiocommandés sans aucune modification de câblage. Grâce au mode Hélicoptère, les professionnels de la photographie aérienne utilisant Ace One restent en terrain connu. Le WK-M utilise des composants de haute qualité calibrés avec précision. La température des capteurs et des gyroscopes est automatiquement compensée et l'appareil utilise un algorithme de vol reconnu dans les domaines du pilotage automatique et des véhicules aériens sans pilote.
9 types de multirotors et configuration de rotors personnalisée
Prend en charge 9 types de configurations de rotors classiques :
Quad J, Quad X
Hexa I, Hexa V, Hexa Y, Hexa IY
Octo X, Octo I, Octo V
Simple à configurer et à installer, cet appareil sans pilote cible les plates-formes multirotors commerciales et industrielles et offre des performances stables.

Fonction de stabilisation de nacelle intégrée
Le module de stabilisation de nacelle est compatible avec la plupart des systèmes de nacelle à deux axes. Une fois le réglage initial des paramètres terminé, le système règle automatiquement la caméra en fonction de l’assiette de l’appareil. La fréquence de sortie des servomoteurs de la nacelle est de 400 Hz, 200 Hz, 100 Hz ou 50 Hz. Plus la fréquence de sortie est élevée, plus l’ajustement sera efficace. Parallèlement, l’angle de roulis et de tangage du servomoteur de la nacelle est étendu à 90°.

Station de commande au sol pour iPad
La station de commande au sol WooKong-M prend désormais en charge les tablettes iPad (iPad 3, iPad 4 et iPad mini). Pour en profiter, il vous suffit de brancher une liaison de données Bluetooth et le module BTU. Finis l’ordinateur portable lourd, les cartes et les pilotes à installer ! Oubliez les problèmes de compatibilité de version du système d’exploitation Windows et les problèmes de connexion à Google Earth ! Vous pouvez contrôler l’appareil depuis votre station au sol, sans fil et en toute simplicité, comme si vous jouiez à un jeu sur iPad. De plus, vous pouvez également placer des points de passage sur votre iPad. Cliquez [ here ] (http://www.dji.com/dji-released-2-4g-bluetooth-datalink-ipad-ground-station/) for more information.

Nouveau logiciel Assistant pour smartphone
Le WooKong-M dispose désormais d’un assistant pour iPhone 4s, iPhone 5, iPad 3, iPad 4, iPad mini et iPod 5. Réglez les paramètres du contrôleur sur vos appareils mobiles facilement et à tout moment grâce à un simple module avec voyant et technologie Bluetooth intégrée. L’appareil émet un signal Bluetooth de faible intensité afin de limiter la consommation électrique de vos appareils mobiles. Facile à utiliser, il enregistre automatiquement vos dernières données de connexion. Le mécanisme de mots de passe garantit votre sécurité. Les paramètres peuvent être automatiquement synchronisés avec le serveur Cloud et rétablis immédiatement au moment où vous avez modifié vos appareils mobiles.

Prise en charge du récepteur Futaba S-bus
Compatible avec la plupart des signaux radio MIC ou 2,4 Ghz

Contrôleur d'alimentation
Spécialement conçu pour résoudre les problèmes de consommation élevée du système d’alimentation auxiliaire du WKM. Il comprend deux sorties d’alimentation séparées pour le récepteur et l’ensemble du système WKM, un contrôleur de tension de la batterie et deux interfaces CAN-bus.

Amortisseur intégré
Léger et peu encombrant, il peut être facilement installé dans des espaces restreints et s’adapte à différentes tailles d’appareils.

Position précise et maintien de l'altitude
Le WKM permet de maintenir l’altitude et la position des multirotors en cas de grand vent. Il garantit une précision horizontale de 2 m et une précision verticale de 0,5 m en vol stationnaire.

Haute précision et sensation de conduite
Grâce au WKM, le multirotor devient aussi facile à manœuvrer qu’une voiture. L’utilisateur n’est plus accaparé par le pilotage du multirotor et peut se concentrer sur d’autres tâches, telles que le réglage de l’angle de la caméra.

Mode d'activation/de désactivation des moteurs
-
Démarrage des moteurs : lorsque vous utilisez le WKM, les moteurs ne démarrent pas lorsque vous poussez le manche des gaz avant le décollage. Vous devez exécuter l’une des quatre commandes de manche combinées suivantes pour démarrer les moteurs.
-
Arrêt des moteurs : il existe deux façons d’arrêter les moteurs : l’arrêt immédiat et l’arrêt intelligent. Mode immédiat : lorsque vous utilisez ce mode dans n’importe quel mode de commande, les moteurs s’éteignent automatiquement lorsque le manche des gaz passe sous la barre des 10 %. Si vous poussez le manche des gaz au-delà de 10 % dans les 5 secondes suivant l’arrêt des moteurs, les moteurs redémarreront et vous n’aurez pas besoin d’exécuter de commande de manche combinée. Si vous ne poussez pas le manche des gaz dans les trois secondes suivant le démarrage des moteurs, les moteurs s’arrêteront automatiquement. Mode intelligent : lorsque vous utilisez ce mode, la procédure d’arrêt des moteurs varie selon le mode de commande sélectionné. En mode manuel, vous devez exécuter une commande de manche combinée pour arrêter les moteurs. En mode Atti. ou GPS Atti., les moteurs s’arrêtent dans les quatre cas suivants :
Plusieurs modes de commande de vol/commutation intelligente
| Mode GPS Atti. | Mode Atti. | Mode manuel | |
| Signification du manche de commandes | Contrôle d'assiette multiple ; manche en position neutre (assiette de 0º), extrémité à 35º. | La vitesse angulaire maximale est de 150°/s. Angle d'assiette illimité et vitesse verticale verrouillée. | |
| Linéarité des commandes | OUI | ||
| Manche relâché | Verrouille la position des rotors lorsque le signal GPS est adéquat. | Stabilisation de l'assiette uniquement. | NON recommandé |
| Verrouillage de l'altitude | Maintient l'altitude à plus d'un mètre du sol. | NON | |
| Perte du signal GPS | 10 s après la perte du signal GPS, le système entre automatiquement en mode Atti. | Stabilisation de l'assiette sans verrouillage de la position. | — |
| Sécurité | Contrôle de l'assiette et de la vitesse pour une stabilité optimale ; procédure de sécurité améliorée | Dépend de l'expérience. | |
| Applications | Photographie aérienne | Vol sportif. | — |

Point d'intérêt
Le WooKong-M possède une nouvelle fonction nommée Point d’intérêt. Lorsque le signal GPS est fort, les utilisateurs peuvent enregistrer la position actuelle de l’appareil comme point d’intérêt en appuyant sur le bouton prédéfini de la télécommande. Si vous exécutez une commande de roulis, l’appareil volera alors en cercle autour du point d’intérêt, le nez orienté vers une zone de 5 à 500 mètres de rayon. Cette fonction facile à configurer et à utiliser permet de filmer un paysage fixe sous tous les angles.

Activation du mode RTH par l'émetteur
Outre la fonction RTH de sécurité intégrée, le WooKong-M peut désormais passer en mode RTH depuis l'émetteur. Il est inutile d'activer le mode Sécurité.
Compatibilité iOSD MARK II
Le WooKong-M prend désormais en charge iOSD MARK II. Cela vous permettra d'améliorer les performances de votre vol à coup sûr. Fondé sur la technologie d'intégration de données historiques et fiables de DJI, le système iOSD MARK II peut acquérir des données de vol extrêmement précises en un temps record.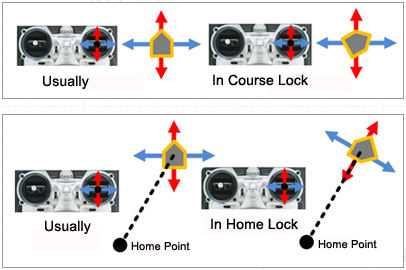
IOC (Intelligent Orientation Control, commande d'orientation intelligente)
En général, la direction avant d’un multirotor en vol est identique à celle du nez. Avec IOC, quelle que soit l’orientation du nez, la direction avant est indépendante de celle du nez :
en mode Course Lock (Verrouillage du trajet), la direction avant correspond à la direction enregistrée par le nez. Consultez les schémas suivants (mode 2) : en mode Home Lock (Verrouillage du point de départ), la direction avant correspond à la direction allant du point de départ vers le multirotor. Consultez les schémas suivants (mode 2) :

Sécurité renforcée et retour au point de départ/atterrissage automatique
La fonction Sécurité renforcée permet de s'assurer que le multirotor effectue automatiquement un vol stationnaire en cas de perte du signal radio. Si le signal est perdu pendant un certain laps de temps, le WKM calculera l'itinéraire le plus sûr pour renvoyer l'hélicoptère au point de départ. L'hélicoptère effectuera un vol stationnaire au-dessus de votre point de départ GPS et atterrira automatiquement. Cette fonction permet de protéger les charges et les équipements coûteux transportés par la plate-forme.
Protection en cas de perte de puissance du multirotor
Dans la plupart des cas, le multirotor conserve une bonne assiette et tourne autour de l'axe du bras désalimenté, en raison du déséquilibre mécanique et de l'environnement extérieur. La rotation dépend principalement de la charge utile et de l'environnement extérieur. Plus la charge utile est lourde, plus la rotation est rapide. Au cours de la rotation, la dérive de l'hexarotor peut devenir incontrôlable en raison la structure physique de l'appareil. En mode Attitude ou GPS, la fonction de protection du WooKong-M permet de garder le contrôle de l'assiette même en cas de perte de puissance, ce qui réduit fortement le risque d'accident.
Deux niveaux de protection de sous-tension et Retour automatique au point de départ
Pour empêcher le multirotor de s'écraser ou de provoquer tout autre dégât ou blessure en cas de sous-tension de la batterie, nous avons conçu deux niveaux de protection de sous-tension. Vous pouvez choisir de ne pas les utiliser, mais tous deux disposent de voyants d'avertissement par défaut. Au premier niveau, un voyant jaune clignote en continu. Au deuxième niveau, un voyant rouge clignote en continu. Comparez les fonctions de retour au point de départ et d'atterrissage des modes Protection de sous-tension et Sécurité renforcée. Les points de départ sont générés de la même manière, les itinéraires de retour sont identiques, mais l'appareil n'effectue pas de vol stationnaire avant d'atterrir en mode Protection de sous-tension.
Transformation en système de commande de station au sol
Le WooKong-M peut être transformé en station au sol, une plate-forme sans opérateur puissante capable de satisfaire les clients les plus exigeants.
Pour en bénéficier, il vous suffit d’acheter une liaison de données DJI professionnelle et d’installer la dernière version du micrologiciel WooKong-M (v. 5.26). La station au sol est gratuite, prend en charge 50 points de passage et ne nécessite aucun numéro de série. Outre la carte en 3D, la station intègre également diverses fonctions de commande au sol : commande par joystick/au clavier, décollage en une touche et départ en un clic.