




マルチローター安定化コントローラー
DJI Wookong マルチローター安定化コントローラーは、商業および工業での AP 利用に適した、すべてのマルチロータープラットフォーム用の完全なフライトシステムです。その他のものと異なり、WooKong は配線の変更を行うことなく RC ヘリコプターへ一般的に使用されている通常の ESC を使用することができます。ヘリモードセットアップでは、現在の Ace One AP プロフェッショナル向けにシームレスな移行が可能です。WK-M は、すべてのジャイロ、センサー、オートパイロットおよび UAV フィールドで工業的に著名なフライトアルゴリズムで温度補正により正確に校正されている高品質コンポーネントを活用しています。
9 種類のマルチローターおよびカスタマイズ済みモーターミキサー
9 つの従来型モーターミキサーをサポートしています:
Quad I、Quad X
Hexa I、Hexa V、Hexa Y、Hexa IY
Octo X、Octo I、Octo V
シンプルな構成、簡単な取り付け、安定した性能である商業および工業マルチロータープラットフォームを目標とした UAS です。

内蔵ジンバル安定化機能
このジンバル安定化機能は、多くの 2 軸ジンバルシステムに互換しています。最初にパラメータを設定後、このシステムは機体の姿勢に応じてカメラを調整します。ジンバルサーボ出力周波数の範囲は、400hz、200hz、100hz、50hz であり、高い周波数の出力により、さらに効率的な調整を行います。同時にジンバルサーボのロールおよびピッチ限界を 90°まで拡大しています。

iPad グラウンドコントロールステーション (GCS) のサポート
WooKong-M GCS は現在 iPad (現在 iPad 3、iPad4、iPad mini) をサポートしており、必要なのは Bluetooth データリンクおよび BTU モジュールへのプラグインだけです。重いラップトップの時代は過去のものとなり、マップやドライバーのインストールも不要です。Windows OS バージョンの互換性問題も忘れてください。Google Earth への心配は不要です。長いケーブルを必要とせずに、iPad でゲームをするようにお使いの Ground Station による機体のコントロールが簡単です。iPad ウェイポイントを使用する傾向が強くなっていることが新たな見どころとなりつつあります。詳細な情報については、こちら をクリックしてください。

スマートフォン用新型アシスタントソフトウェア
WooKong-M は現在 iPhone4s、iPhone5、iPad3、iPad4、iPadmini、iPod5 向けアシスタントソフトウェアを提供しています。より簡単かつ便利な内蔵 Bluetooth モジュールの LED インジケータを使うだけで、お使いのモバイルデバイスからいつでもパラメータ調整が可能です。低電力 Bluetooth を使用して、お使いのモバイルデバイスの電力消費量を最小化します。操作が簡単であり、最後に接続した記録を自動的に保存します。パスワードメカニズムにより安全なリンクを確保します。パラメータは自動的にクラウドサーバーへ同期化することができ、お使いのモバイルデバイスを変更にするとすぐに保存できます。

Futaba S-bus 受信機のサポート
ほぼすべての無線 PCM または 2.4Ghz に互換

電源モニタリングユニット
電源サポートシステムの高電力消費問題を解決するため WKM のために特別に設計されました。WKM システム全体と受信機向けの 2 つの個別電源出力、1 つのバッテリー電圧モニター、および 2 つの CAN-Bus インターフェースが付いています。

内蔵ダンパー
本体の小型化と軽量化により、様々な機体サイズでも狭いスペースで取り付けが簡単です。

正確な位置および高度保持
WKM により、マルチローターは風の強い状況でも位置と高度を固定します。水平 2m 未満、垂直 0.5m 未満での正確なホバリング。

高い正確性と操縦感覚
WKM により、マルチローターのフライトは自動車の運転と同じくらい簡単になります。パイロットはマルチローターの制御ストレスから解放され、フライトだけに集中することなく、カメラアングルなどのその他のタスクへさらに注意を配ることができます。

モーターのアーム/ディスアームモード
1.モーターを起動します:WKM を使用している場合、離陸前にスロットルスティックを押してもモーターは起動しません。モーターを起動させるには 4 つあるコンビネーションスティックコマンド (CSC) のいずれかを実行する必要があります。
2.モーターを停止します:モーターを停止するオプションは 2 つあります:イミディエートモードとインテリジェントモードです。 イミディエートモード:このモードを使用することで、あらゆるコントロールモードで、モーターが始動し、スロットルスティックが 10% を超えた後、スロットルスティックが再び 10% 未満になると、モーターはすぐに停止します。この場合、モーター停止後 5 秒以内にスロットルスティックを 10% 超になるまで押すと、モーターは再起動します。CSC は必要ありません。モーターが起動した後 3 秒以内にスロットルスティックを押さない場合、モーターは自動的に停止します。 インテリジェントモード:このモードを使用することで、異なるコントロールモードではモーターの停止方法が変わります。マニュアルモードでは、CSC の実行だけでモーターを停止させることができます。姿勢または GPS 姿勢モードでは、以下の 4 つの場合のいずれかでモーターが停止します:
多重フライトコントロールモード/インテリジェントスイッチング
| GPS 姿勢モード | 姿勢モード | マニュアルモード | |
| コマンドスティックの意味 | マルチ姿勢コントロールでは、0º の姿勢でセンター位置を保持し、エンドポイントは 35º です。 | 最大角速度は 150°/秒です。姿勢角度制限や垂直速度ロックはありません。 | |
| コマンド線形性 | YES | ||
| リリースされたスティック | GPS 信号が適正である場合、ローター位置をロックします。 | 姿勢安定化のみ。 | 非推奨 |
| 高度ロック | 地上 1 メートル超で最適高度を維持します。 | NO | |
| GPS 喪失 | GPS 信号を喪失してから 10 秒後、システムは姿勢モードへ自動的に切り替わります。 | ポジションロックなしに姿勢安定化のみを実施。 | — |
| 安全性 | 姿勢および速度混合比制御により安定性を確保、強化されたフェールセーフ | 経験によります。 | |
| アプリケーション | AP 作業 | スポーツフライト。 | — |

ポイントオブインタレスト (POI)
WooKong-M には以下の新機能があります:ポイントオブインタレスト。GPS 信号が良好な場合、ユーザーはリモコンのプリセットスイッチを使用して航空機の現在位置をポイントオブインタレストとして記録することができます。ロールの指令がが与えられると、航空機は半径 5m から 500m の範囲内で機首をそのポイントに向けポイントオブインタレストの周りを旋回します。この機能は簡単に設定でき操作することができ、一定観測点からの全方位撮影に最適です。

送信機の RTH スイッチ
フェールセーフ RTH の機能に加え、WooKong-M には現在、送信機の RTH スイッチの新機能が付いています。フェールセーフモードへ切り替える必要はありません。
iOSD MARK II のサポート
WooKong-M は現在、iOSD MARK II をサポートしています。これにより、間違いなく、素晴らしいフライト性能が実現されます。DJI が、歴史があり信頼が置ける情報統合技術を蓄積することで、iOSD MARK II は、限りなく最短の時間で、もっとも正確な第一次フライトデータ情報を手に入れることができます。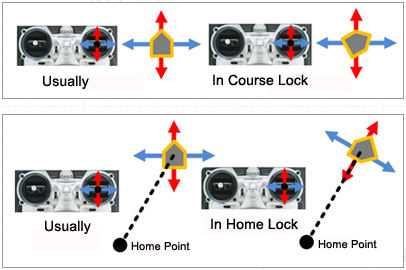
インテリジェントオリエンテーションコントロール (IOC)
通常、フライとしているマルチローターの前進方向は機首方向と同じです。インテリジェントオリエンテーションコントロール (IOC) を使えば、機首がどの方向を向いても前進方向は機首の向きとは関係がなくなります:
コースロックフライトでは、前進方向は記録された機首方向と同じです。以下の図を確認してください (モード 2): ホームロックフライト時には、前進方向はホームポイントからマルチローターへの方向と同じです。以下の図を確認してください (モード 2):

強化されたフェールセーフと自動帰還/着陸
強化されたフェールセーフは、マルチローターが RC 信号を喪失した場合、自動的にホバリングする機能です。一定時間信号を喪失すると、WKM はヘリコプターをホームポジションへ帰還させるのに最も安全な進路を計算します。ヘリコプターはお使いの GPS スタートポイントでホバリングを行い、自動的に着陸します。この機能により、プラットフォーム上の高価な積載物や機材の安全性を確保することができます。
マルチローター ワンパワーアウトプットフェイル プロテクション
多くの場合、不均衡な機械構造と外部環境により、電源出力なしでマルチローター全体は正しい姿勢を保持し、フレームアーム周辺を回転します。回転は積載量や外部環境を主な原因として発生します。積載物がさらに重い場合、回転スピードは速くなります。回転中、ヘキサローターの物理構造によりラダーはコントロールできない状態になる可能性があります。WooKong-M の姿勢または GPS モードの人為的エラー保護機能により、いずれか一方の電源出力が行われていない状況下でも姿勢を制御し、衝突リスクを大幅に減少させます。
2 段階低電圧保護および自動帰還
低電圧を原因とする、お使いのマルチローターの衝突またはその他の悪影響を避けるため、2 段階の低電圧保護を設計しました。この機能を使用しない選択はできますが、2 段階保護のいずれにも初期設定で LED による警告機能が付いています。最初の段階は黄色の点滅が継続的に起こり、次の段階では赤色の点滅が継続的に起こります。低電圧保護による帰還および着陸と、強化されたフェールセーフによる帰還および着陸を比較すると、ホームロケーションの生成は同じです。帰還ルートは同じです。異なる点は、低電圧保護では着陸前にホバリングを行わない点です。
Ground Station コントロールシステムへのアップグレード
WooKong-M はお客様の高い要求を満足させる、より強力な無人プラットフォームである Ground Station へのアップグレードが可能です。
DJI プロフェッショナルデータリンクと最新の WooKong-M 5.26 ファームウェアへのアップグレードが必要ですが、無料の Ground Station 機能はシリアル番号なしで利用でき、50 個のウェイポイントが無料でサポートされます。3D マップの他に、グラウンドコントロール機能として、ジョイスティック/キーボードコントロール、ワンキーによる離陸、クリックアンドゴー機能などが含まれています。